SPI协议
SPI简介
串行外设接口(Serial Peripheral Interface)的简称也叫做SPI,是一种高速的、全双工同步通信的一种接口,串行外设接口一般是需要4根线来进行通信(NSS、MISO、MOSI、SCK),但是如果打算实现单向通信(最少3根线),就可以利用这种机制实现一对多或者一对一的通信。
主从模式
SPI分为主、从两种模式,一个SPI通讯系统需要包含一个(且只能是一个)主设备,一个或多个从设备。提供时钟的为主设备(Master),接收时钟的设备为从设备(Slave),SPI接口的读写操作,都是由主设备发起。当存在多个从设备时,通过各自的片选信号进行管理。
引脚定义
SPI接口一般使用四条信号线通信:
SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)
MISO: 主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。
MOSI: 主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。
SCK : 用于 SPI 主器件的串行时钟输出以及 SP从器件的串行时钟输入。
NSS/CS/SS:从器件选择。这是用于选择从器件的可选引脚。此引脚用作“片选”可让 SP主器件与从器件进行单独通信,从而并避免数据线上的竞争。
SPI一对一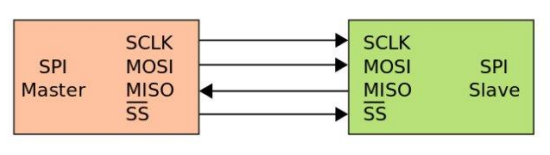
SPI一对多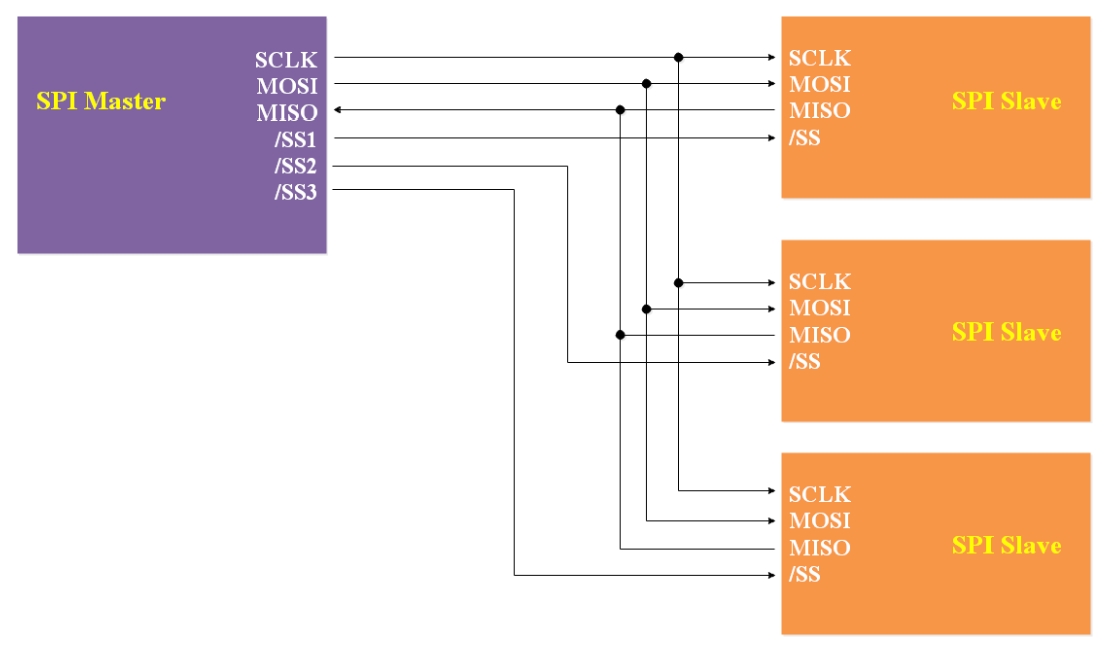
数据收发
SPI总线采用的环形结构,利用的是主从模式(主机—->从机)进行数据的传输,由于是同步通信,所以在主机发送数据的同时也会收到从机发送的数据。
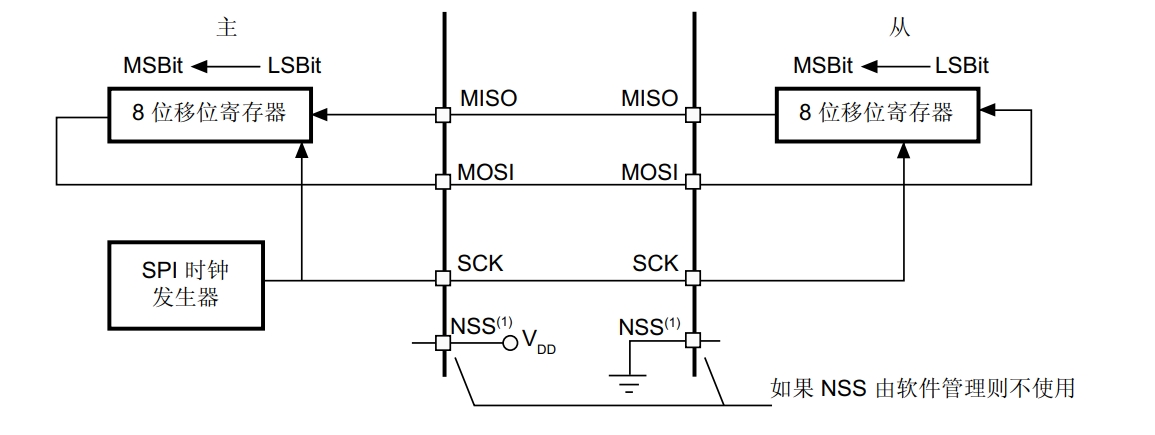
MOSI 引脚连接在一起,MISO 引脚连接在一起。通过这种方式,主器件和从器件之间以串行方式传输数据(最高有效位在前)。
通信始终由主器件发起。当主器件通过 MOSI 引脚向从器件发送数据时,从器件同时通过 MISO 引脚做出响应。这是一个数据输出和数据输入都由同一时钟进行同步的 1 全双工通信过程。
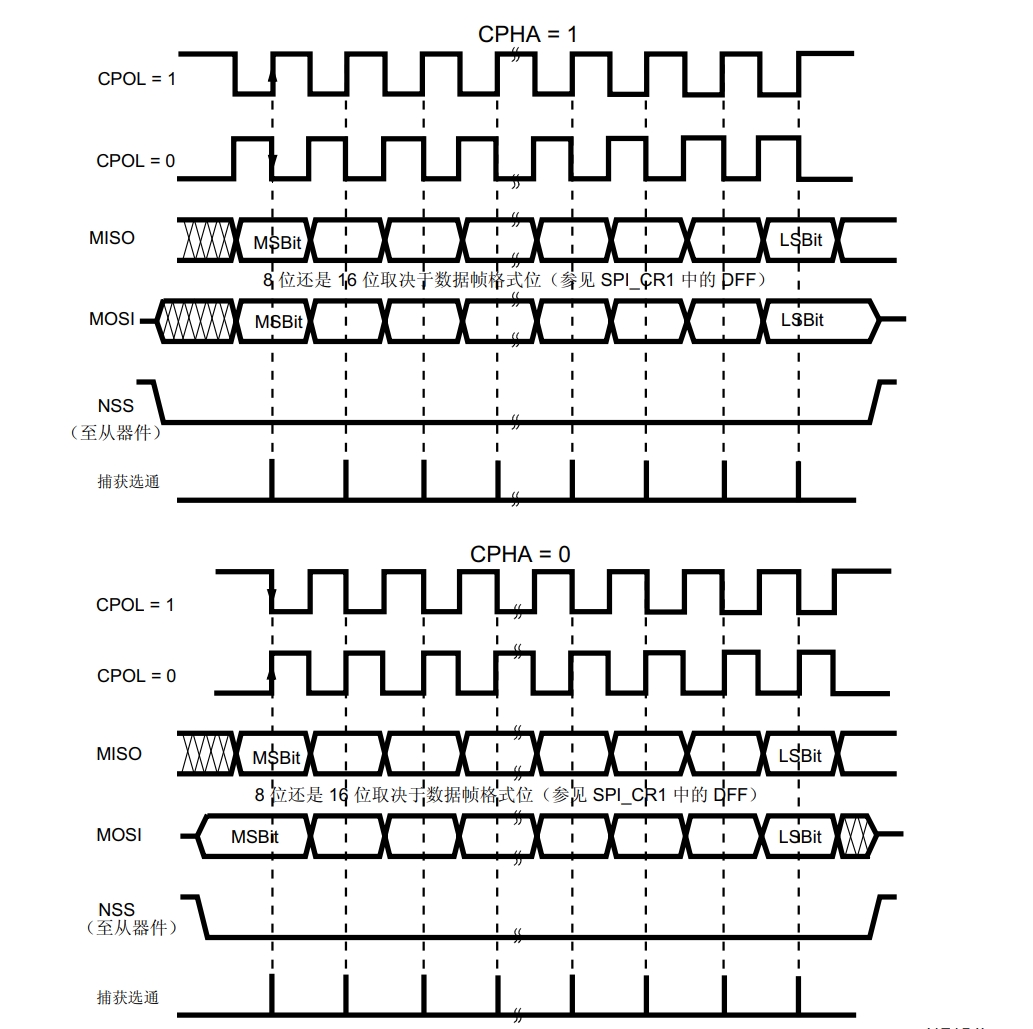
工作模式
SPI通信有4种不同的操作模式,通过CPOL(时钟极性)和CPHA(时钟相位)来控制我们主设备的通信模式,具体如下:
时钟极性(CPOL)定义了时钟空闲状态电平:
CPOL=0,表示处于空闲态时SCK时钟线处于低电平,所以有效状态就是SCK处于高电平时
CPOL=1,表示处于空闲态时SCK时钟线处于高电平,所以有效状态就是SCK处于低电平时
时钟相位(CPHA)定义数据的采集时间。
CPHA=0,在时钟的第一个跳变沿(上升沿或下降沿)进行数据锁存。
CPHA=1,在时钟的第二个跳变沿(上升沿或下降沿)进行数据锁存。
Mode0:CPOL=0,CPHA=0:此时空闲态时,SCK处于低电平,数据采样是在第1个边沿。
Mode1:CPOL=0,CPHA=1:此时空闲态时,SCK处于低电平,数据发送是在第2个边沿。
Mode2:CPOL=1,CPHA=0:此时空闲态时,SCK处于高电平,数据采集是在第1个边沿。
Mode3:CPOL=1,CPHA=1:此时空闲态时,SCK处于高电平,数据发送是在第2个边沿。
模拟SPI时序
以 STM32F407ZET6 和 W25Q128 闪存芯片为例,利用IO口模拟SPI时序实现对存储IC进行读取操作
SCK – PB3 输出模式
MOSI – PB5 输出模式
MISO – PB4 输入模式
CS – PB14 输出模式
1 |
采用模式0 SCK引脚空闲高电平,第二个边沿锁存数据
1 | uint8_t W25Q128_SendByte(uint8_t byte) |
采用模式3 SCK引脚空闲高电平,第二个边沿锁存数据
1 | uint8_t W25Q128_SendByte(uint8_t byte) |
参考文章
STM32F4xx中文参考手册